Submitted by sascha on
Die Piper PA34 Seneca II ist in Flightgear recht schön umgesetzt und ich fliege die relativ oft. Der Autopilot kann so leidlich Höhe und Kurs halten, ist aber leider nicht in der Lage einem VOR-Radial oder einem Localizer sauber zu folgen. Er steuert extreme Überschwinger so +/- 45° um den Generalkurs herum - zwar irgendwie stabil, aber trotzdem völlig inakzeptabel, vor allem, wenn man sich in der Nähe des Senders bewegt.
Deswegen habe ich mir im Quelltext mal die Parametrierung des NAV-Reglers angesehen (Open Source sei Dank!) und "wahllos" an den interessant aussehenden Knöpfen gedreht ;). So richtig erfolgreich war ich damit aber nicht, weil der Regler ziemlich komplex ist und ausserdem in irgendeinem esoterischen XML beschrieben wird.
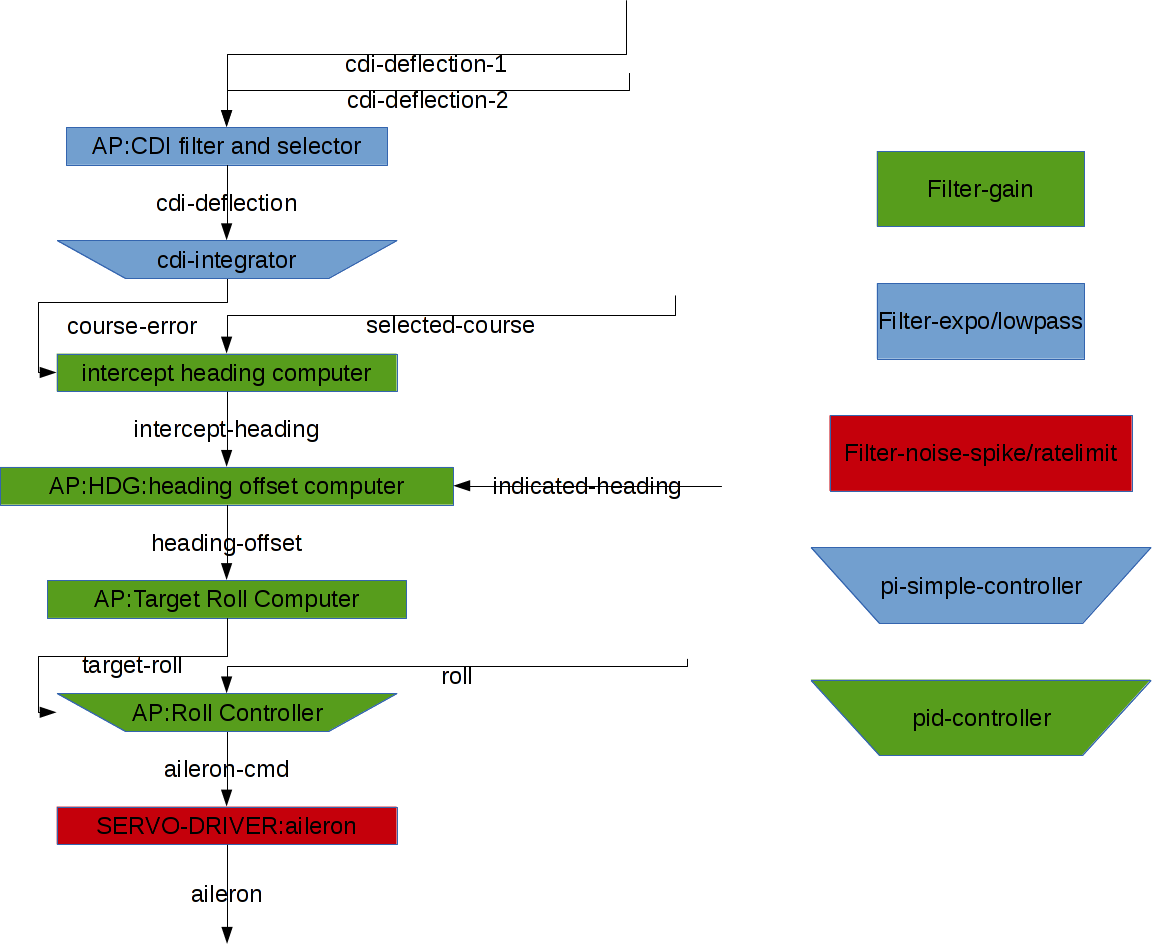
Also habe ich mir erstmal ein Blockschaltbild gemalt, um ihn im Detail zu verstehen und (hoffentlich) etwas verbessern zu können.
Rechts ist die Legende, links die Reglerstruktur. Seitliche Eingänge sind Referenzwerte, oben Inputs, unten Outputs.